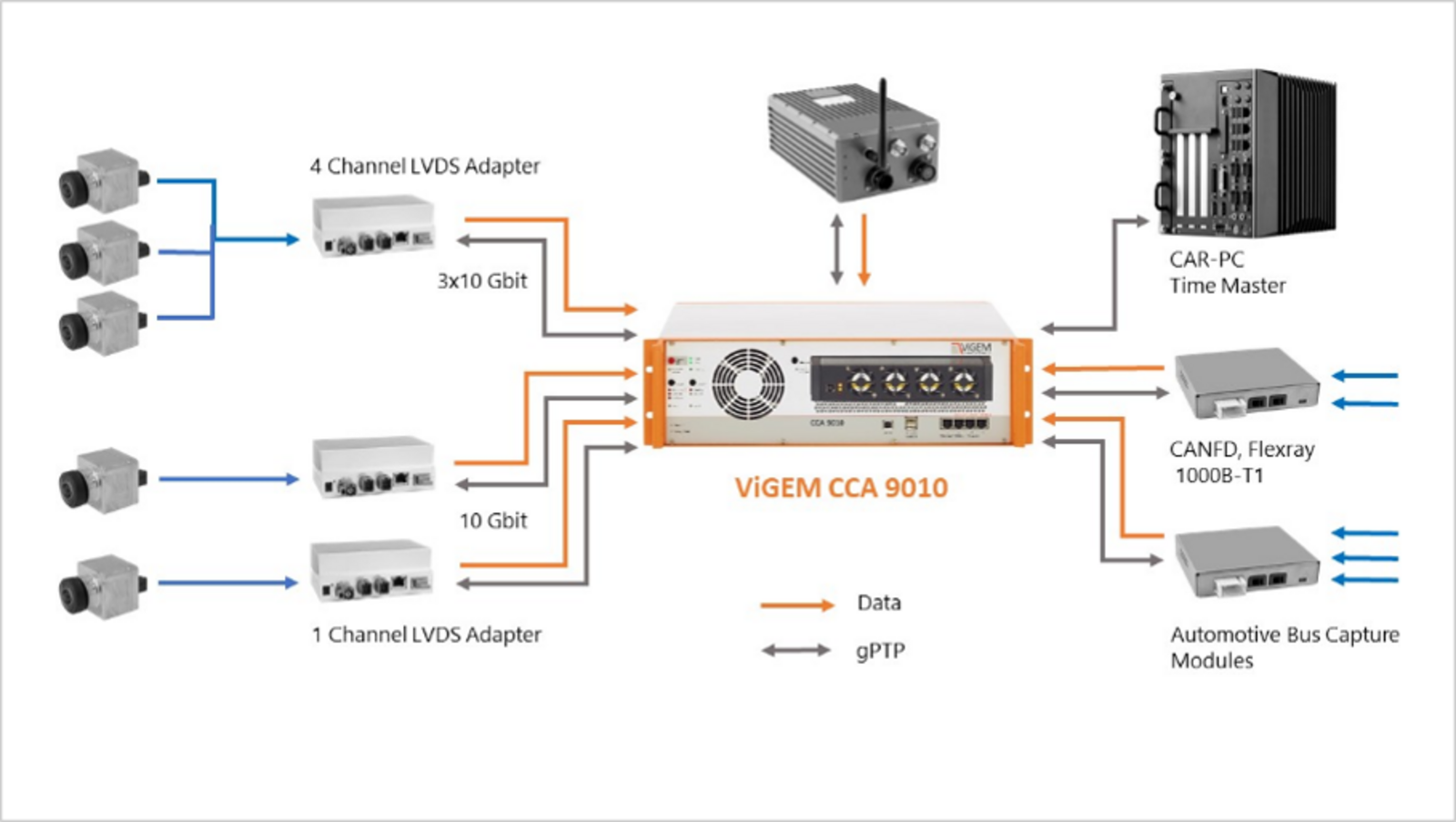
Hierbei sendet der Datenlogger als gPTP-Master regelmäßig seinen internen Zeitstempel an alle verbundenen gPTP-Slaves, welche diese Information zur Korrektur ihrer internen Zeitstempel nutzen. Auf diese Weise werden alle Teile des Logging-Systems auf eine gemeinsame Zeitbasis gestellt und Abweichungen aufgrund von Laufzeitdifferenzen eliminiert. Auch mögliche Unterschiede zwischen den Zeitgebern der einzelnen Capture Module und dem Datenlogger werden dynamisch korrigiert. Somit ist sichergestellt, dass alle am Datenlogger angeschlossenen Fahrzeugbusse, LVDS-Adapter wie z.B. Kamera-, LiDAR oder Radarsensoren entsprechend synchronisiert aufgezeichnet werden.
Sämtliche eingehenden Daten verfügen nun über die exakt gleichen Zeitstempel, was den Entwicklungsabteilungen die Verarbeitung und Analyse der aufgezeichneten Daten extrem erleichtert.